Art of Multiprocessor Programming Summary
![]()
This is short(?) summary of the textbook “Art of Multiprocessor Programming” by Maurice Herlihy & Nir Shavit.
A complete set of lecture slides & sample code is available at the textbook’s companion page
This work is licensed under a Attribution-ShareAlike 3.0.
- Introduction
- Mutual Exclusion
- Concurrent Object
- Foundations of Shared Memory
- The Relative Power of Synchronization Operations
- Universality of Consensus
- Spin Locks and Contention
- Concurrent Linked List
- Concurrent Queue & Stack
Introduction
Asynchronous Computation
- Safety Properties: Nothing bad happens ever
- Mutual Exclusion
- Liveness Properties: Something good happens eventually
- No Deadlock
“Alice & Bob share a pond” / Mutual Exclusion
- Cell Phone Protocol
- One calls the other.
- Problem: recipient might not be listening or not there at all.
Communication must be persistent / not transient
- Flag Protocol
Raise flag -> wait until other’s flag is down -> unleash pet -> lower flag after return- What if both raises flag?? : Deadlock Raise flag -> while other’s flag is up, lower flag & wait -> raise flag -> …
- One must always defer for other. (Unfair & waiting)
Mutual Exclusion
- cannot be solved by transient communication / interrupts
- can be solved by one-bit shared variable
Producer - Consumer
- Producer must inform Consumer when product is ready.
- Consumer must inform Producer if there is no product to use.
Solution
- Producer owns a can.
- knocks over can when product is ready.
- reset can when product is all used up.
Consumer
while (true) { while (can.isUp()) {}; pet.release(); pet.recapture(); can.reset(); }Producer
while (true) { while (can.isDown()) {}; pond.stockWithFood(); can.knockOver(); }- Correctness
- Mutual Exclusion -> safety
pet & Bob never together in pond - No Starvation -> liveness
- Producer/Consumer -> safety
The pet never enter pond unless there is food / Bob never provide food if there is unconsumed food.
- Mutual Exclusion -> safety
Amdahl’s Law
speed up = single thread execution time / n-thread execution time
let p = parallel fraction, n = number of threads
speed up = 1 / (1 - p + p/n)
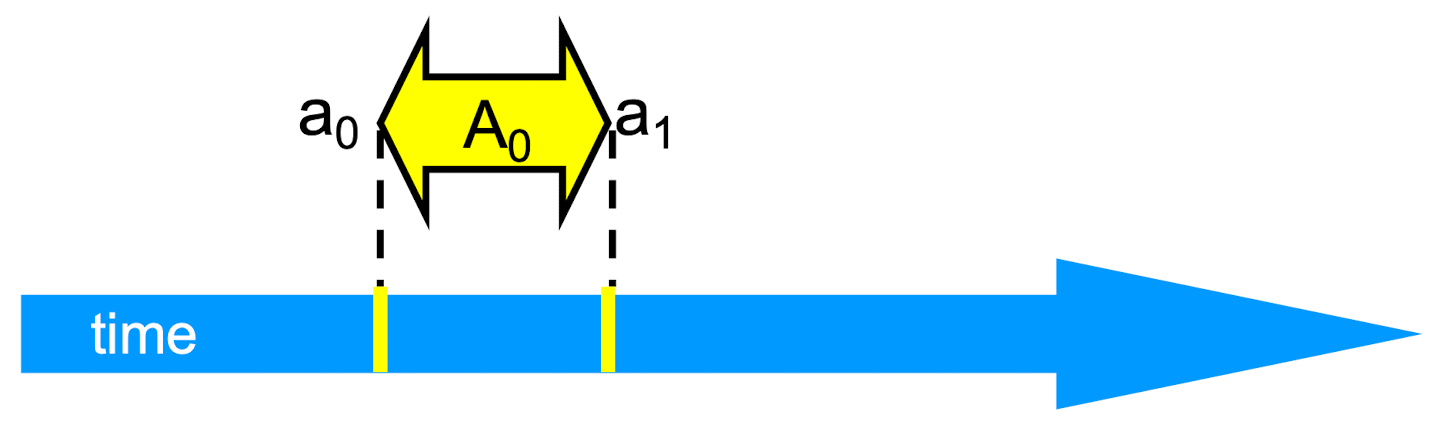
Mutual Exclusion
An event a0 of thread A is
- Instantaneous
- No simultaneous events (break ties)
Interval
An interval A0 = (a0, a1) is Time between events a0 and a1
Precedence
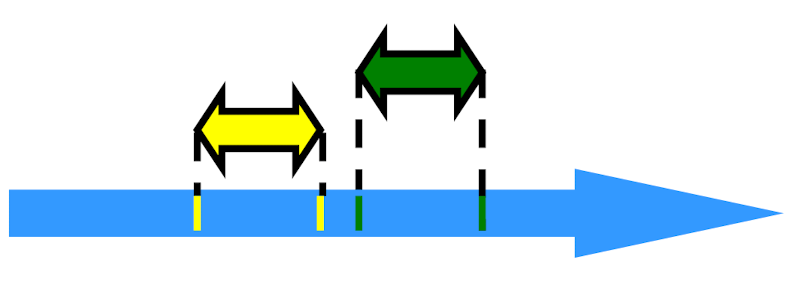
Notation: A0 -> B0
- End event of A0 before start event of B0
- Precedence Ordering
- Irreflexive: Never true that
A -> A - Antisymmetric: If
A - > Bthen not true thatB -> A - Transitive: If
A -> B&B -> CthenA -> C A -> B&B -> Amight both be false! (Overlap)
- Irreflexive: Never true that
Deadlock-Free
System as a whole makes progress
- even if individuals starve
Starvation-Free
Individual threads make progress
Lock
Peterson’s Algorithm (2 threads)
public void lock() {
flag[i] = true;
victim = i;
while (flag[j] && victim == i) {}; //spin-wait
}
public void unlock() {
flag[i] = false;
}
- Solo: other’s flag is false
- Both: one or the other not the victim
- Starvation-Free
Filter Algorithm (n threads)
class Filter implements Lock {
int[] level; // level[i] for thread i
int[] victim; // victim[L] for level L
public Filter(int n) {
level = new int[n];
victim = new int[n];
for (int i = 1; i < n; i++) {
level[i] = 0;
}
}
public void lock() {
for (int L = 0; L < n; L++) {
level[i] = L;
victim[L] = i;
while(((∃k != i) level[k] >= L)) && victim[L] == i) {};
// thread enters level L when it completes the loop above.
}
}
public void unlock(int i) {
level[i] = 0;
}
}
There are n-1 levels.
- At each level
- At least one enters level
- At least one blocked if many try
- Only one thread makes it through
- At most n-L threads enter level L
- mutual exclusion at level L = n-1
- Starvation-Free but weak fairness(overtaken by others who come lately)
Bakery Algorithm
class Bakery implements Lock {
boolean[] flag;
Label[] label;
public Bakery(int n) {
flag = new boolean[n];
label = new Label[n];
for (int i = 0; i < n; i++) {
flag[i] = false;
label[i] = 0;
}
}
public void lock() {
flag[i] = true;
label[i] = max(label[0], ..., label[n-1]) + 1;
while (∃k flag[k] && label[i] > label[k]) {};
// acquire lock iff my label is lowest
}
public void unlock() {
flag[i] = false;
}
}
- Provides FCFS
- Take a number
- Wait until lower numbers have been served
- good fairness
- No deadlock
Concurrent Object
Sequential Specifications for Method
Each method described in isolation
- Precondition: if
- the object’s state before call the method
- Postcondition: then
- return value or exception
- the object’s state after method return
Example - dequeue
- Precondition: Queue is non-empty
- Postcondition: Returns first item in queue / Removes first item in queue Precondition: Queue is empty
Postcondition: Throws empty exception / Queue state unchanged
Concurrent Specifications
Method call is not an event
- Method call is an interval
- Must characterize all possible interactions with concurrent calls.
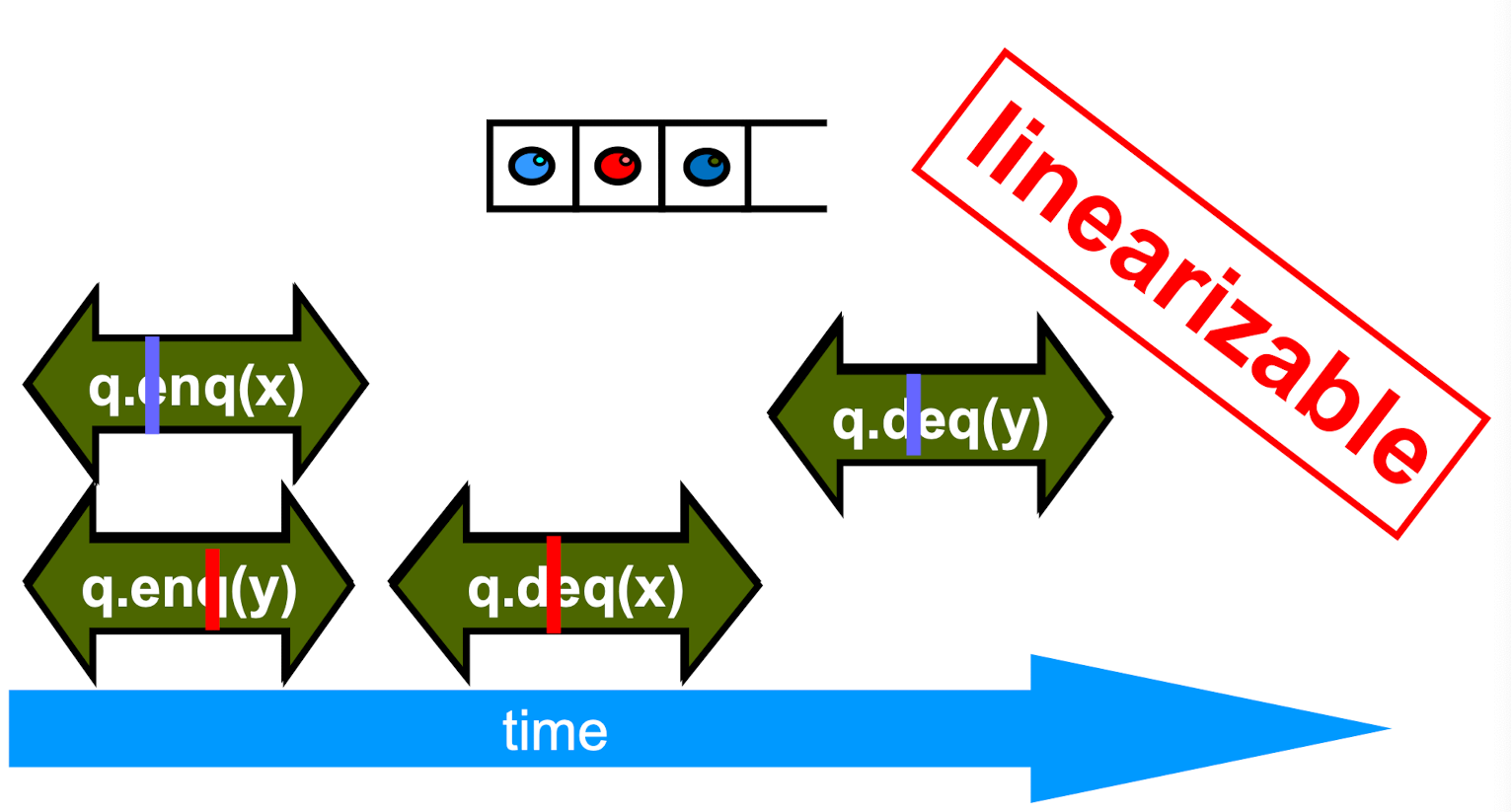
Linearizable Object
- One all of whose possible executions are linearizable
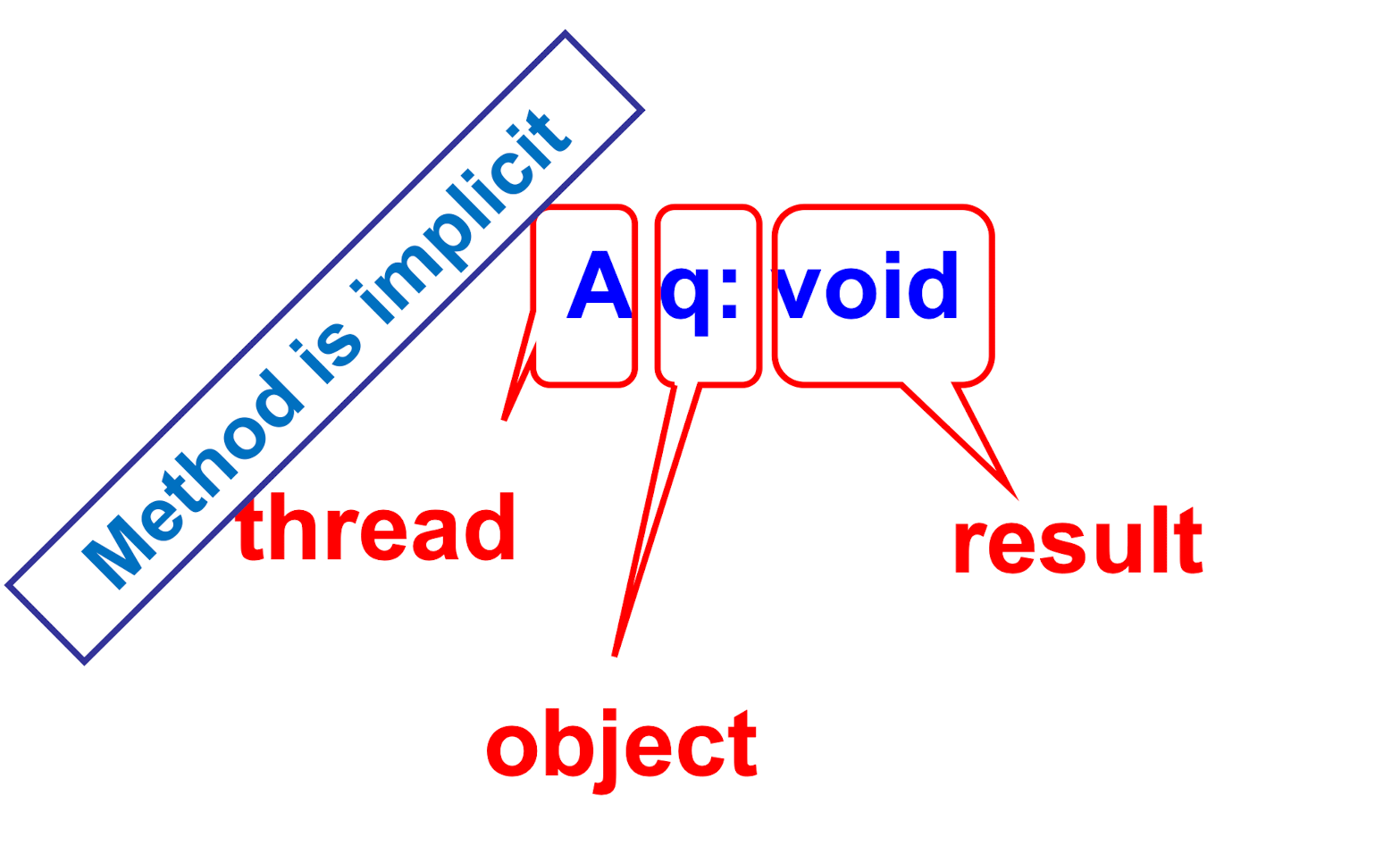
Notations
Invocation Notations
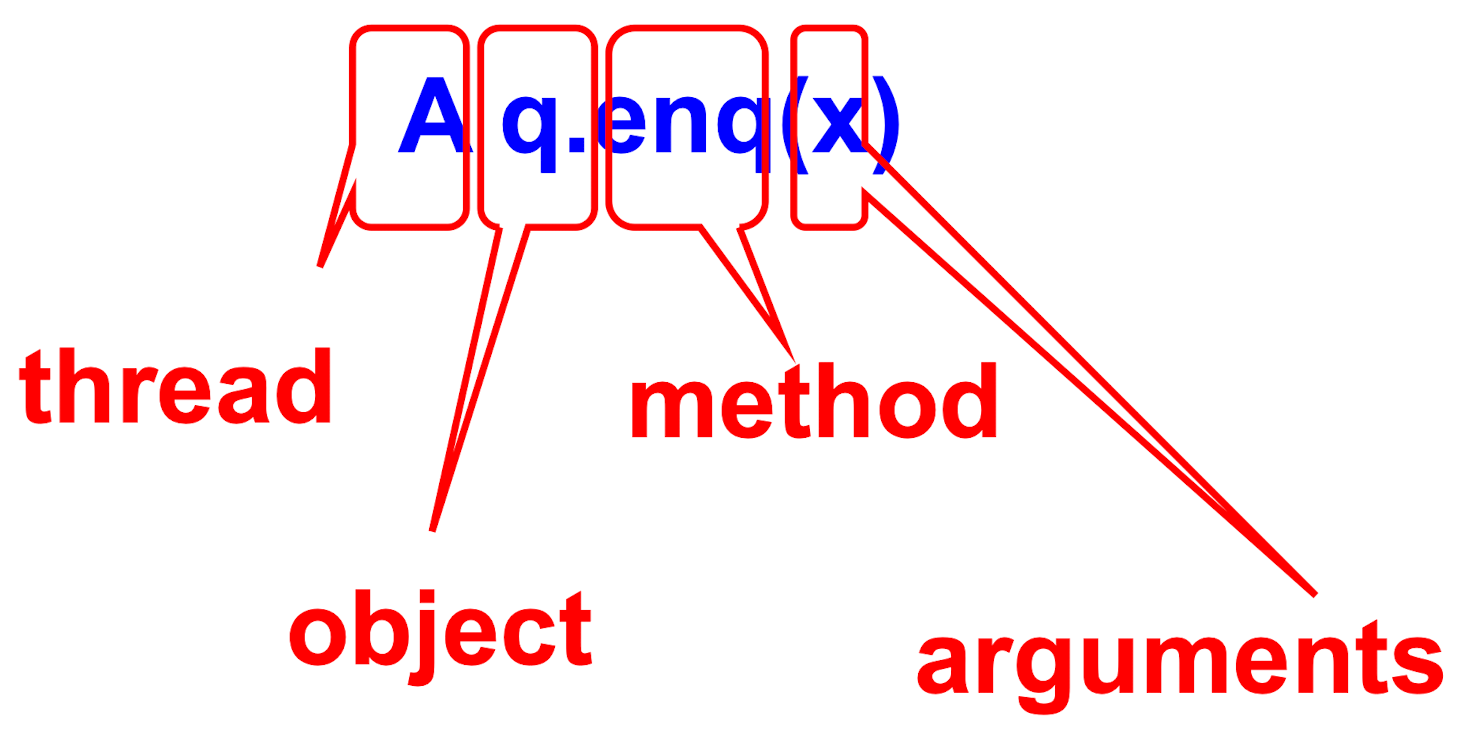
Response Notation
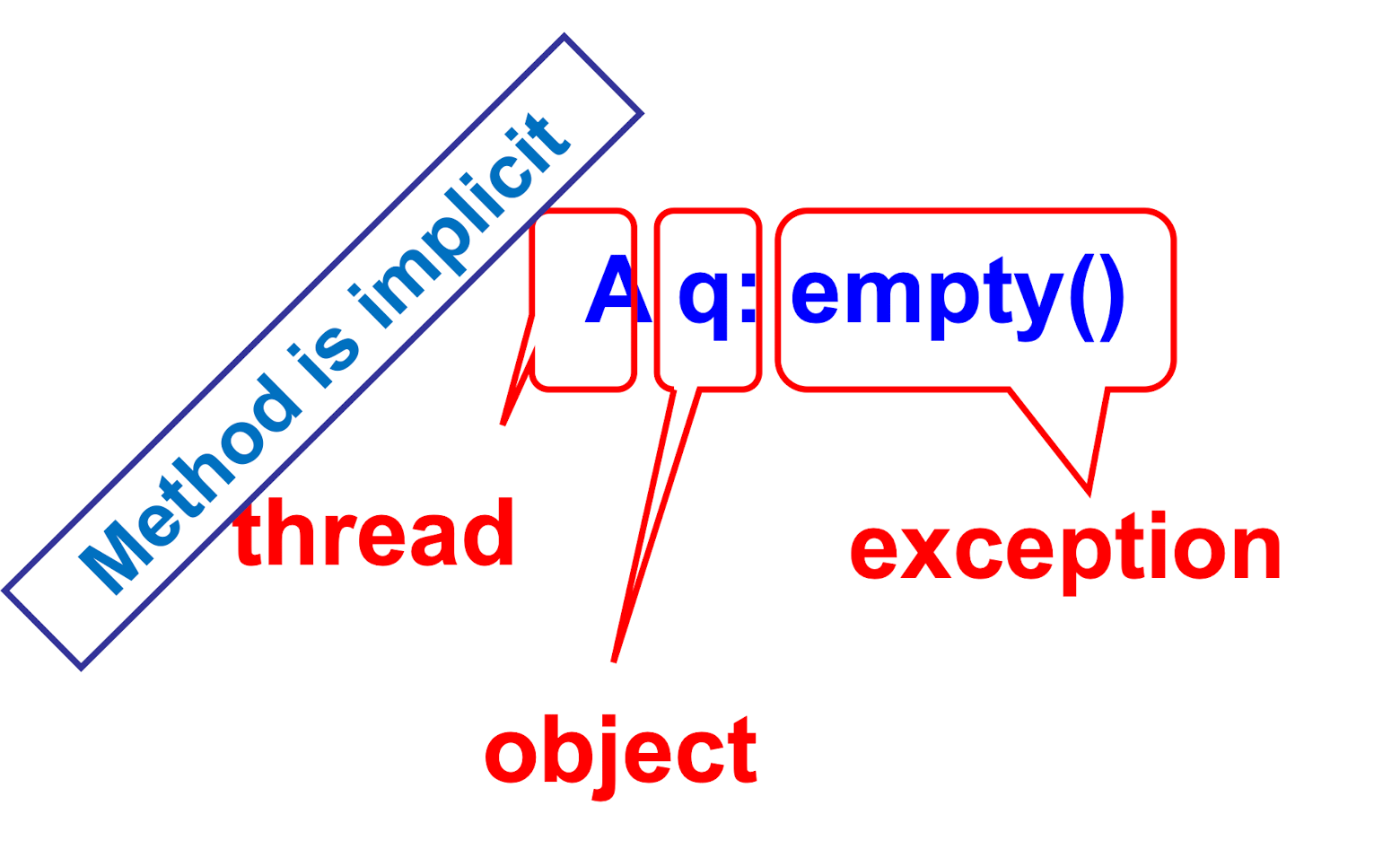
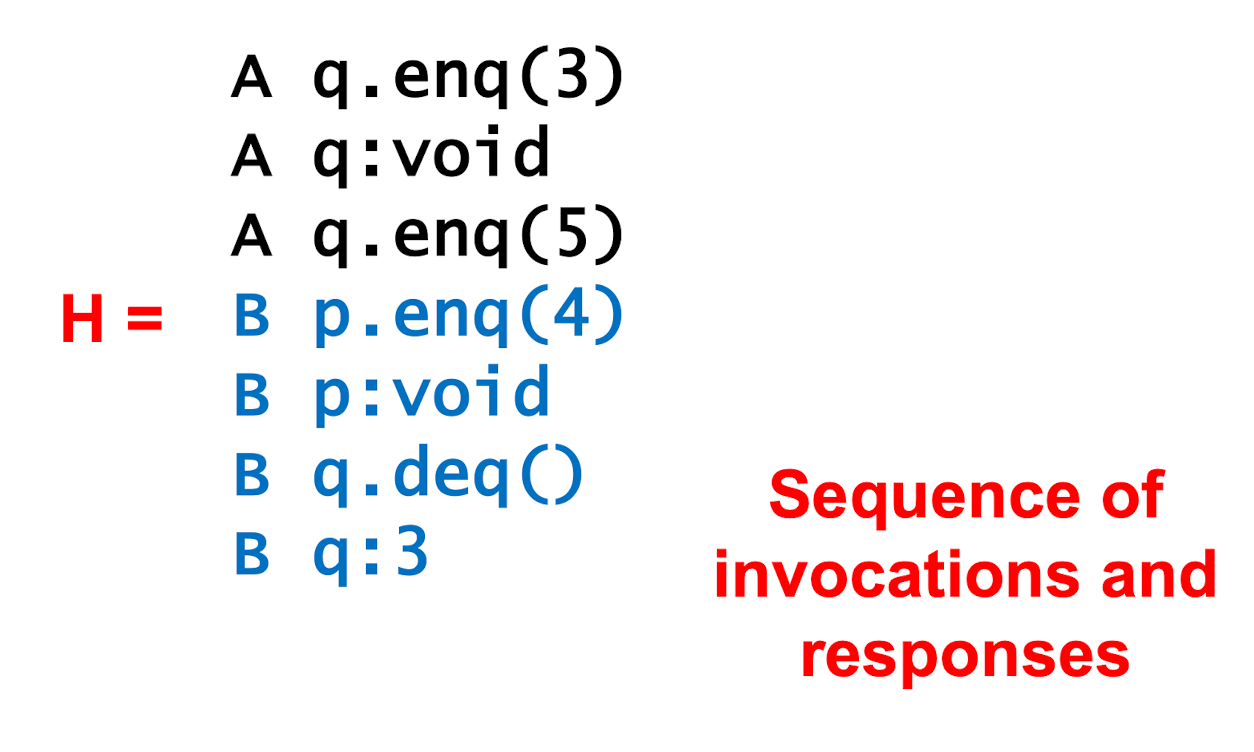
History
- Describing an Execution
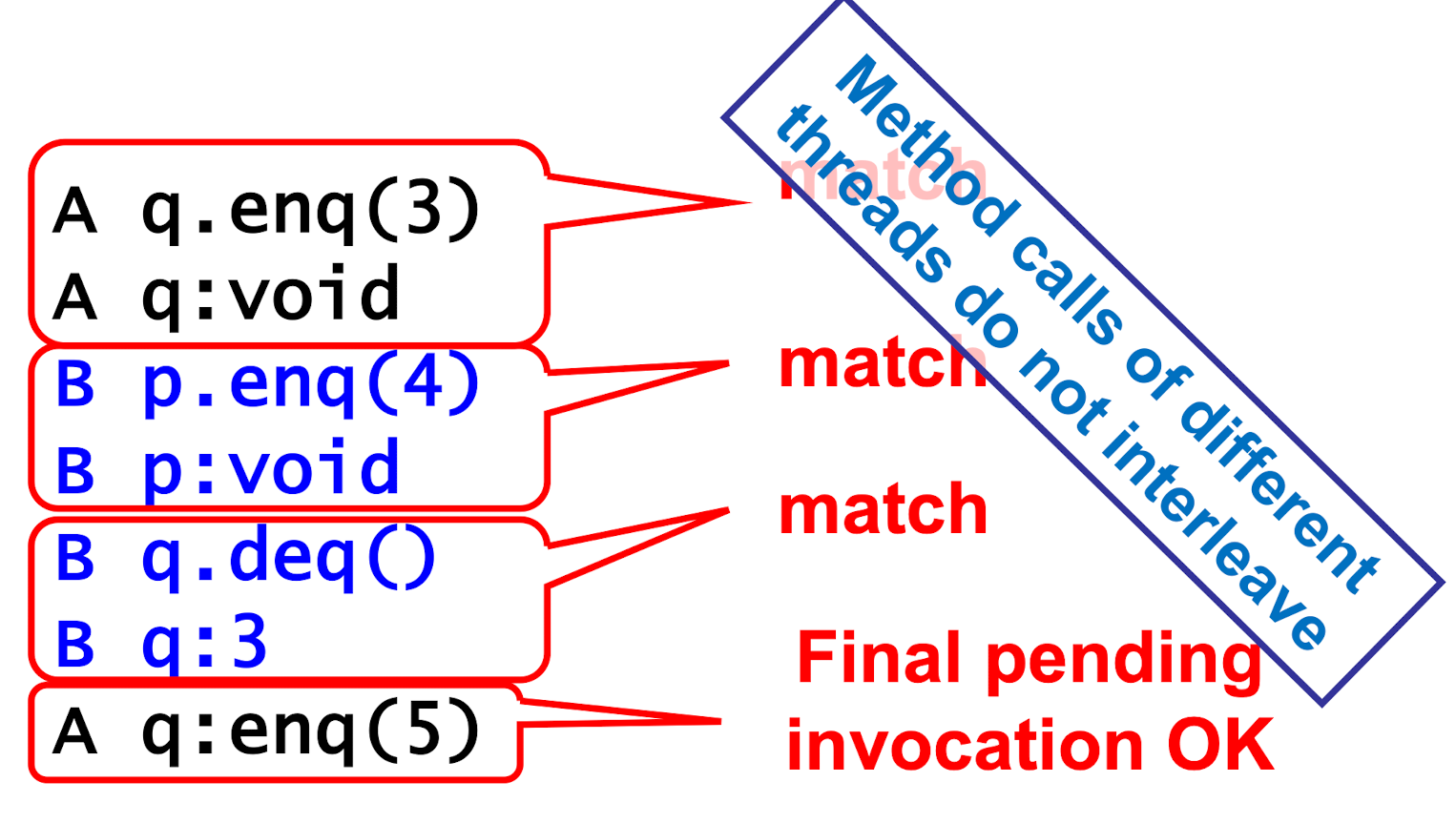
- Invocation & Response match if
- thread names agree & object names agree
- Invocation is pending if
- it has no matching response
- may or may not have taken effect
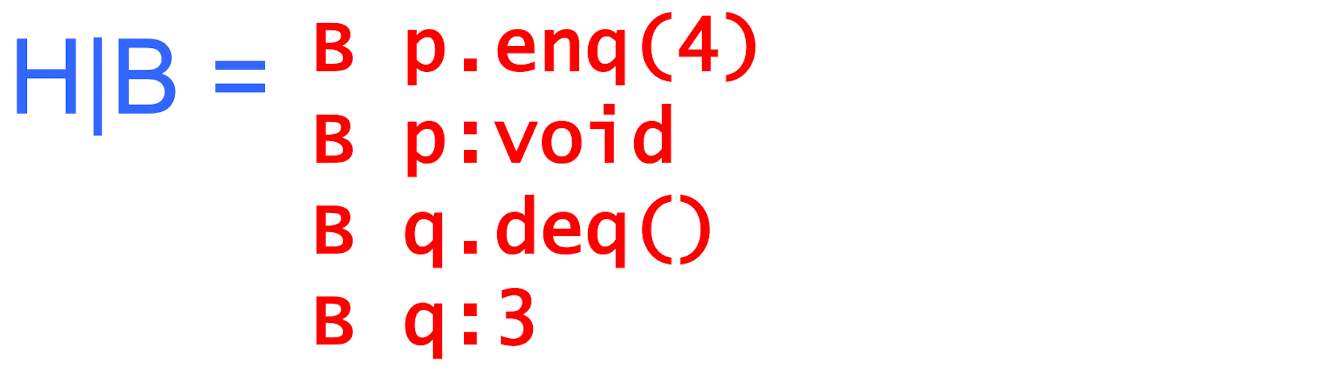
- Object Projections
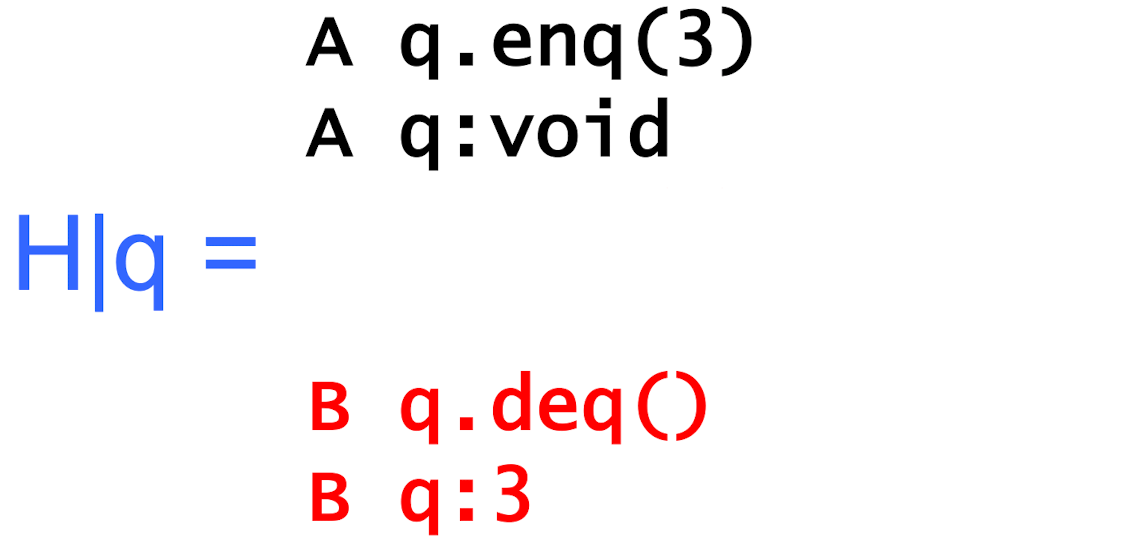
- Thread Projections
Complete Subhistory
- discard pending invocation
Sequential Histories
Well-Formed Histories
- Per-thread projections are sequential
Equivalent Histories
Legal Histories
For every object x, **H x** is in the sequential spec for x
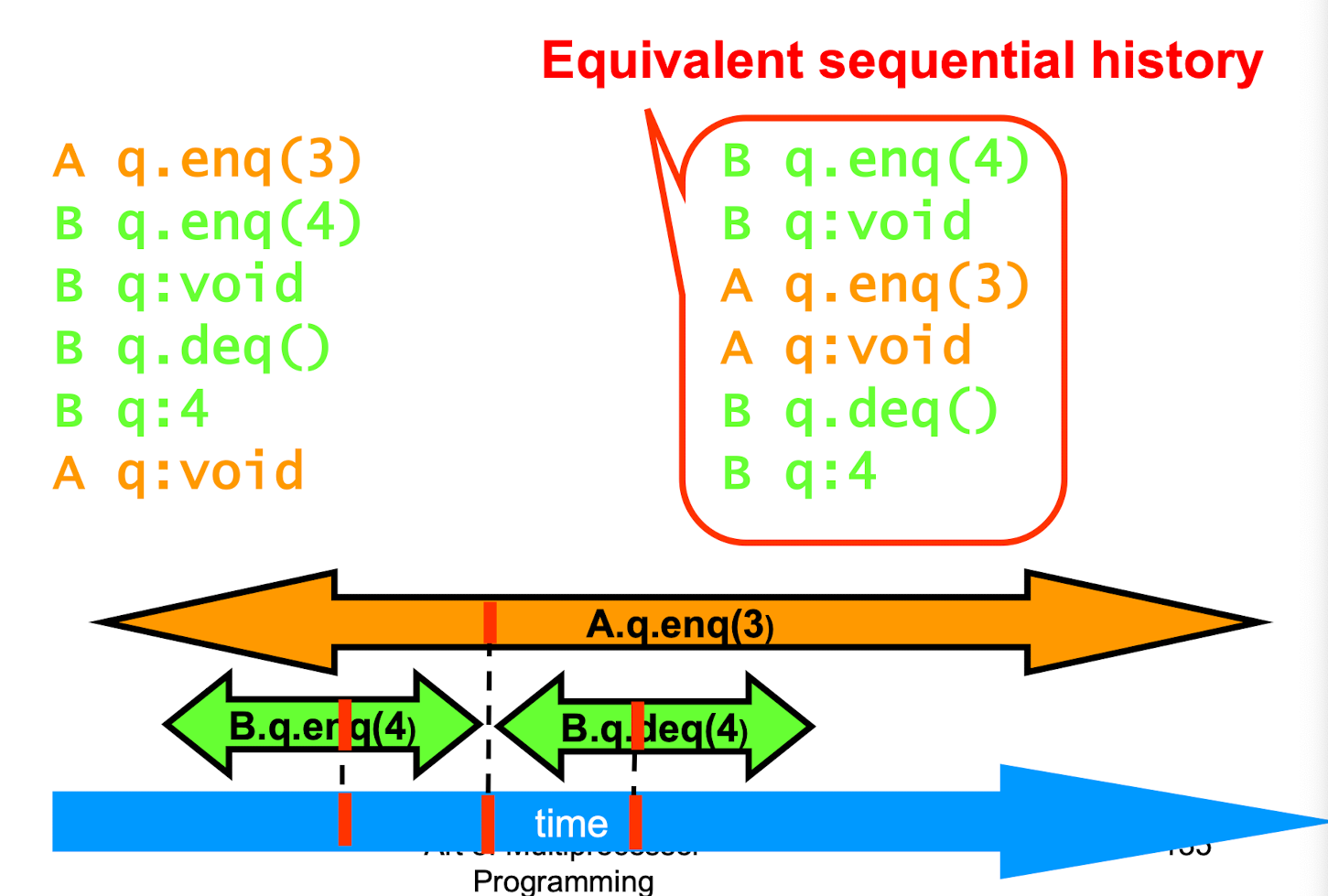
Precedence
- A method call precedes another if response event precedes invocation event
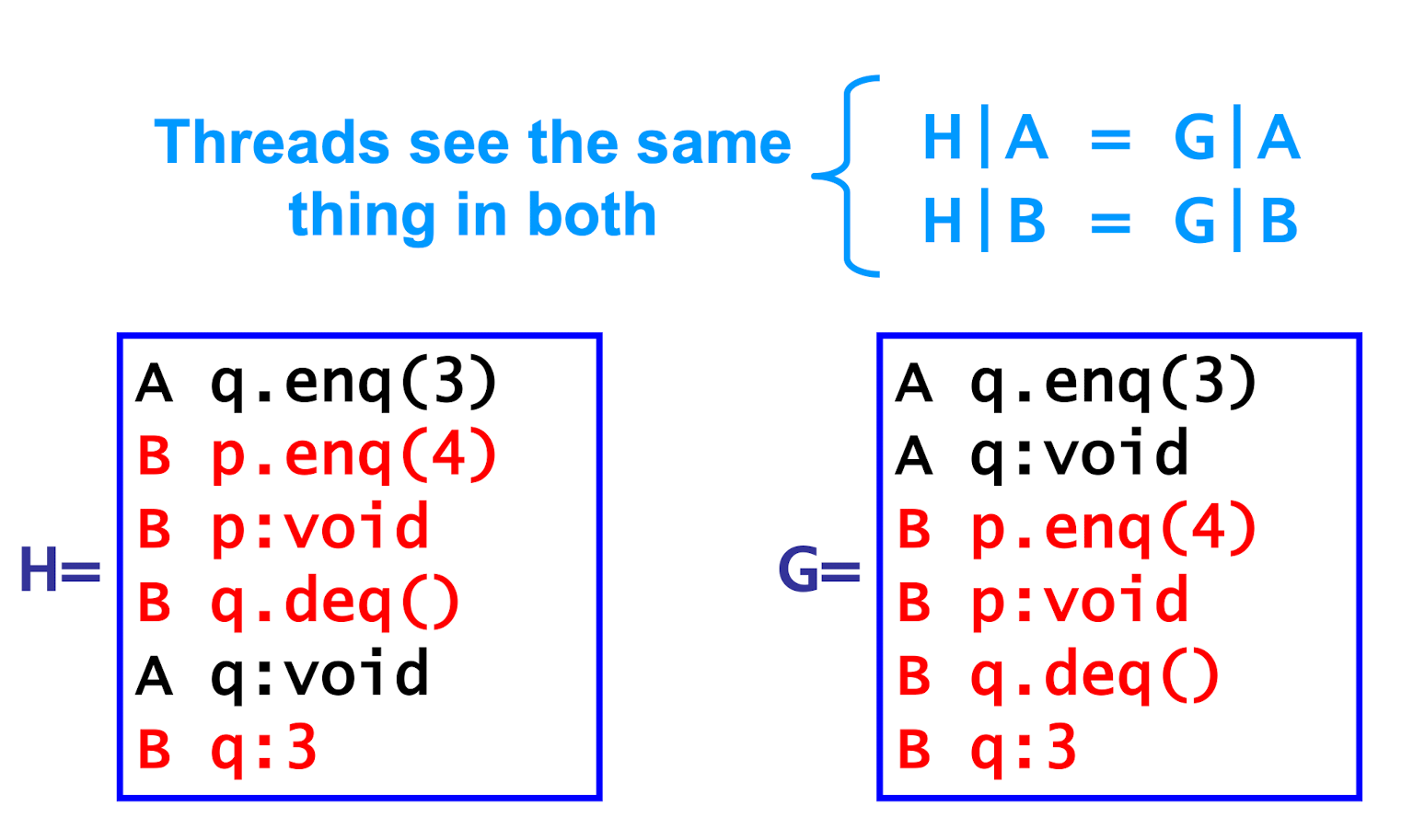
Linearizability
- History H is linearizable if it can be extended to G by
- Appending zero or more responses to pending invocations
- Discarding other pending invocations
- So that G is equivalent to
- Legal sequential history S
- Where ->G ⊂ ->S
- Means that S respects “real-time order” of G
Composability Theorem
- History H is linearizable iff
- For every object x
*H x* is linearizable
Foundations of Shared Memory
Turing Computability
- Mathematical model of computation
- What is (and is not) computable
Shared-Memory Computability
- Mathematical mode of concurrent computation
- What is (and is not) concurrently computable
- Efficiency (mostly) irrelevant
Wait-Free
- every method call completes in a finite # of steps
Safe Register
- OK if reads & writes don’t overlap
- Some valid value if reads & writes do overlap
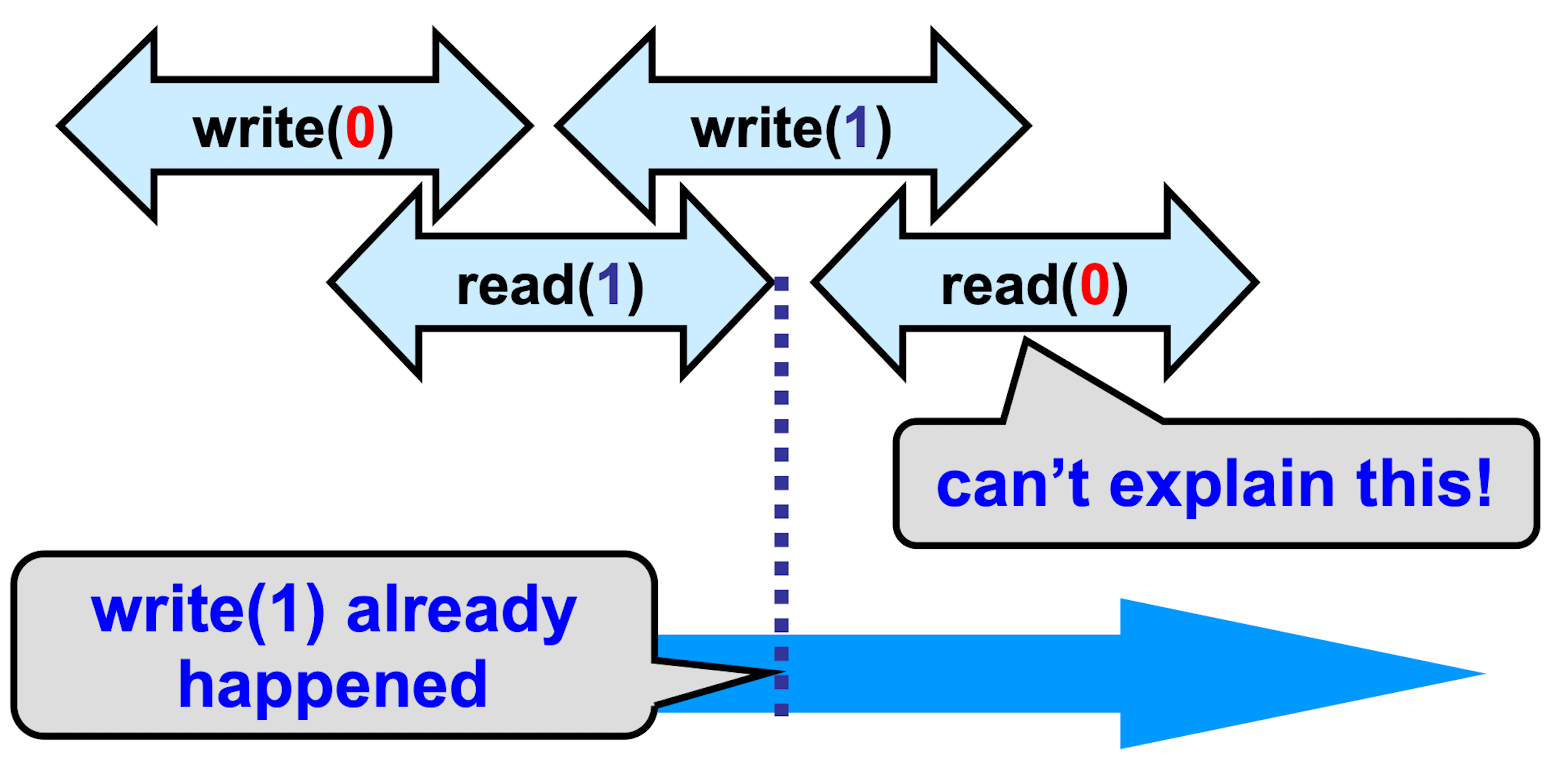
Regular Register
old or new value if overlap
Regular ≠ Linearizable
Road Map
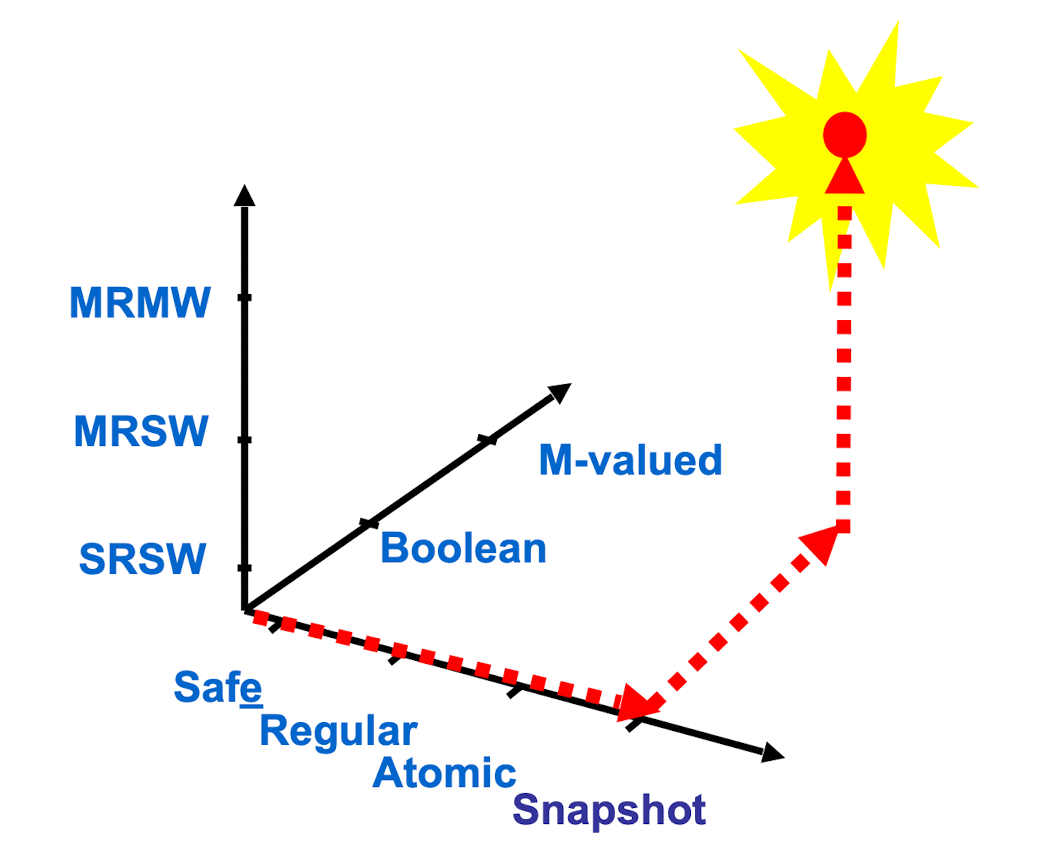
SRSW Safe Boolean
- Get correct reading if not during state transition
MRSW Safe Boolean
public class SafeBoolMRSWRegister implements Register<Boolean> {
private SafeBoolSRSWRegister r = new SafeBoolSRSWRegister[N];
public void write(boolean x) {
for (int j = 0; j < N; j++)
r[j].write(x);
}
public boolean read() {
int i = ThreadID.get();
return r[i].read();
}
}
- Multi-Valued MRSW also works
MRSW Regular Boolean
- Naive Approach : problem occurs if writer writes same value.
- Don’t perform write if old value is equal to input
public class RegBoolMRSWRegister implements Register<Boolean> {
private boolean old;
private SafeBoolMRSWRegister value;
public void write(boolean x) {
if (old != x) {
value.write(x);
old = x;
}
}
public boolean read() {
return value.read();
}
}
MRSW Regular
- Multi-Valued register
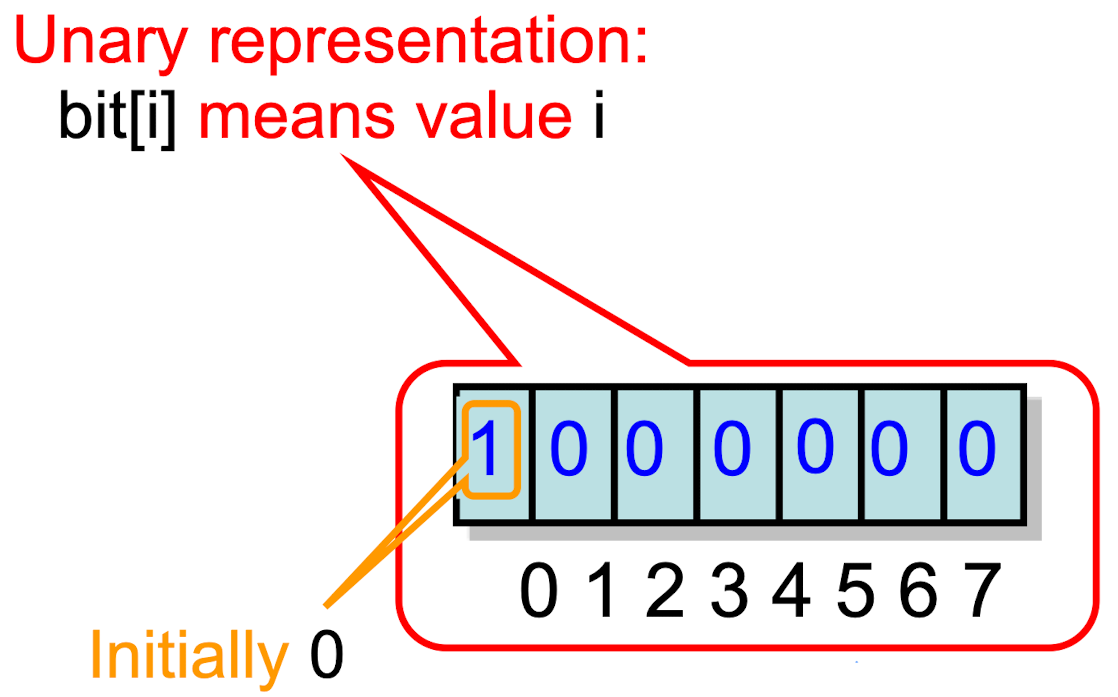
public class RegMRSWRegister implements Register {
RegBoolMRSWRegister[M] bit;
public void write(int x) {
this.bit[x].write(true);
for (int i = x-1; i >= 0; i--) {
this.bit[i].write(false);
}
}
public int read() {
for (int i = 0; i < M; i++) {
if (this.bit[i].read())
return i;
}
}
}
SRSW Atomic
- Timestamped Values
- Writer writes value & stamp together
- Reader saves last value & stamp read
- Reader returns new value iff stamp is higher
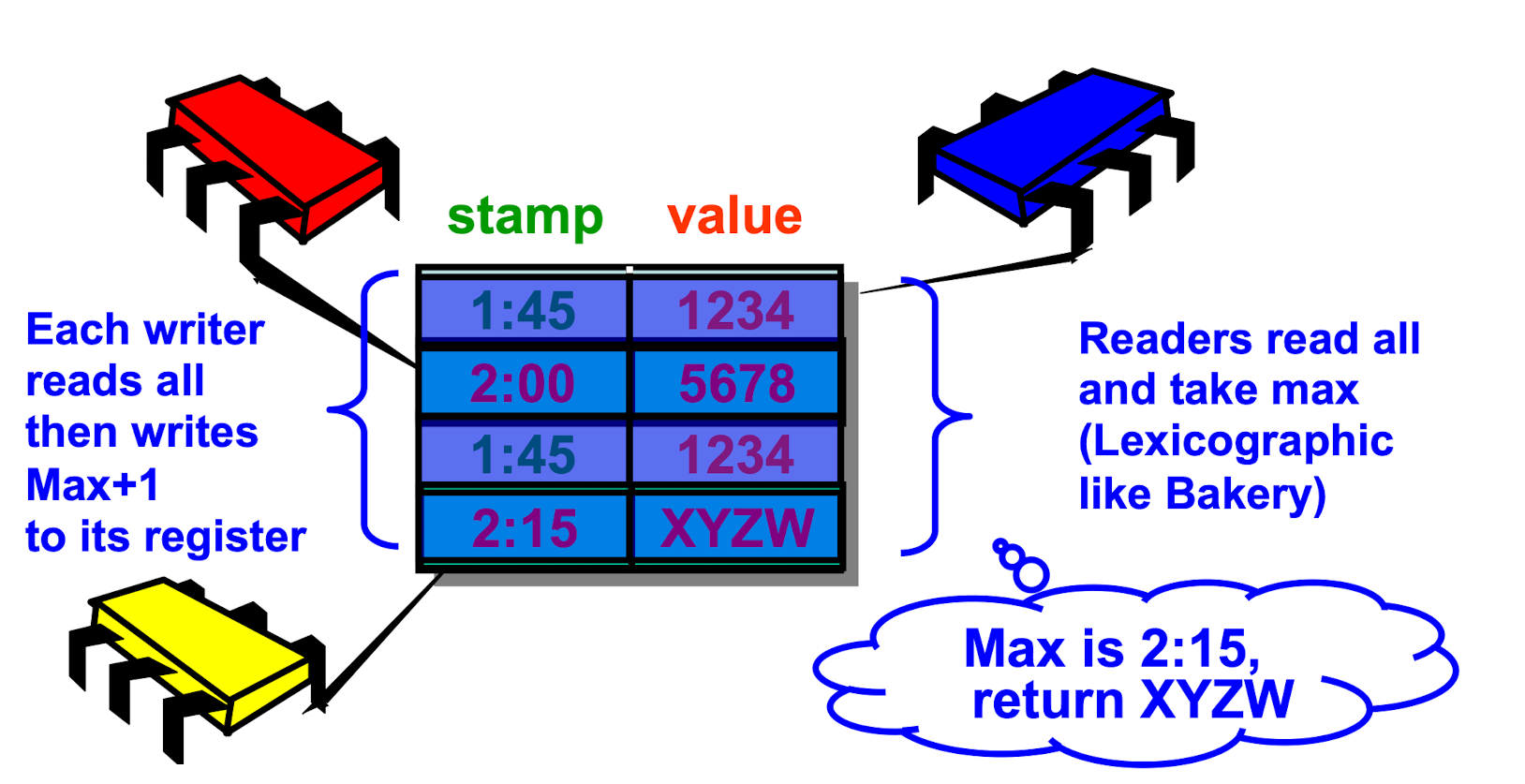
MRSW Atomic
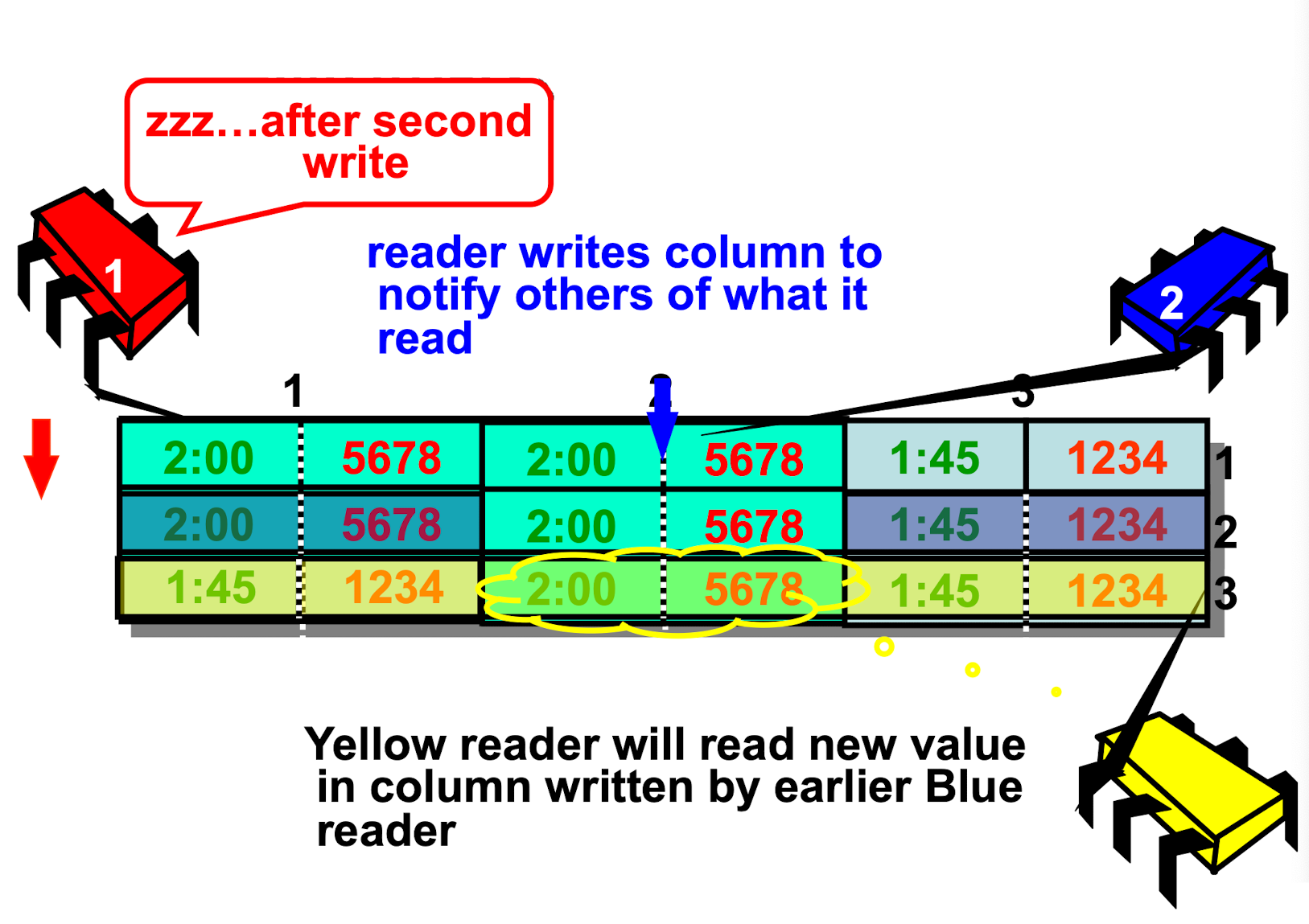
- Yellow may miss Blue’s update iff they overlap.
MRMW Atomic
Atomic Simple Snapshot
- Array of MRSW atomic registers
- Collect twice
- If both agree, done
- otherwise, redo
public class SimpleSnapshot implements Snapshot {
private AtomicMRSWRegister[] register;
public void update(int value) {
int i = Thread.getID();
LabeledValue oldValue = register[i].read();
LabeledValue newValue = new LabeledValue(oldValue.label+1, value);
register[i].write(newValue);
}
private LabeledValue[] collect() {
LabeledValue[] = copy = new LabeledValue[n];
for (int i = 0; i < n; i++)
copy[i] = this.register[j].read();
return copy;
}
public int[] scan() {
LabeledValue[] oldCopy, newCopy;
oldCopy = collect();
redo:
while (true) {
newCopy = collect();
if (!equals(oldCopy, newCopy)) {
oldCopy = newCopy;
continue redo;
}
return getValues(newCopy);
}
}
}
- Linearizable
update()is wait-freescan()can starve
Wait-Free Snapshot
- Add a
scan()beforeupdate() - If
scan()is continuously interrupted by updates,scan()can take the update’s snapshot
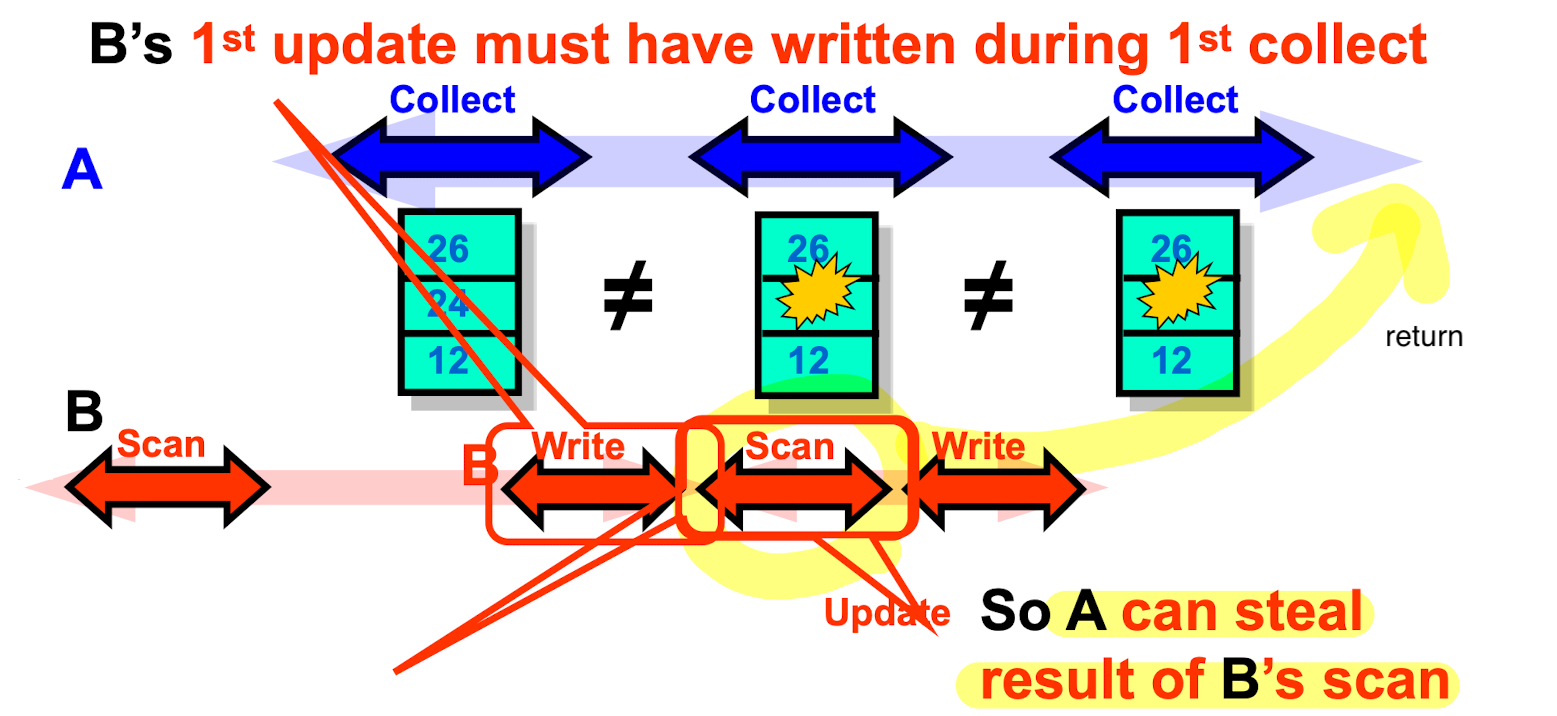
- If same thread interrupts twice, take it’s snapshot.
scan()can only be interrupted at most n-1 times before taking update’s snapshot(thus wait-free)
public class SnapValue {
public int label;
public int value;
public int[] snap; // most recent snapshot taken by update
}
public class WaitFreeSnapshot implements Snapshot {
private AtomicMRSWRegister[] register;
public void update(int value) {
int i = Thread.getID();
int[] snap = this.scan(); // scan before write
SnapValue oldValue = r[i].read();
SnapValue newValue = new SnapValue(oldValue.label+1, value, snap);
r[i].write(newValue);
}
private SnapValue[] collect() {
SnapValue[] = copy = new SnapValue[n];
for (int i = 0; i < n; i++)
copy[i] = this.register[j].read();
return copy;
}
public int[] scan() {
SnapValue[] oldCopy, newCopy;
boolean[] moved new boolean[n];
oldCopy = collect();
redo:
while (true) {
newCopy = collect();
for (int i = 0; i < n; i++) {
if (oldCopy[i].label != newCopy[i].label) {
if (moved[i]) { // second move
return newCopy[i].snap;
} else {
moved[i] = true;
oldCopy = newCopy;
continue redo;
}
}
}
return getValues(newCopy);
}
}
}
The Relative Power of Synchronization Operations
Wait-Free Implementation
- Every method call completes in finite number of steps
- Implies no mutual exclusion
Problem of Mutual Exclusion
- Asynchronous Interrupts
- owner swapped out
- Heterogeneous Processors
- owner is very slow processor
- Fault-tolerance
- owner is crashed
- Machine Level Instruction Granularity
- Amdahl’s Law
Consensus
- Consistent
- All threads decide the same value
- Valid
- The common decision value is some thread’s input
Wait-Free Computation
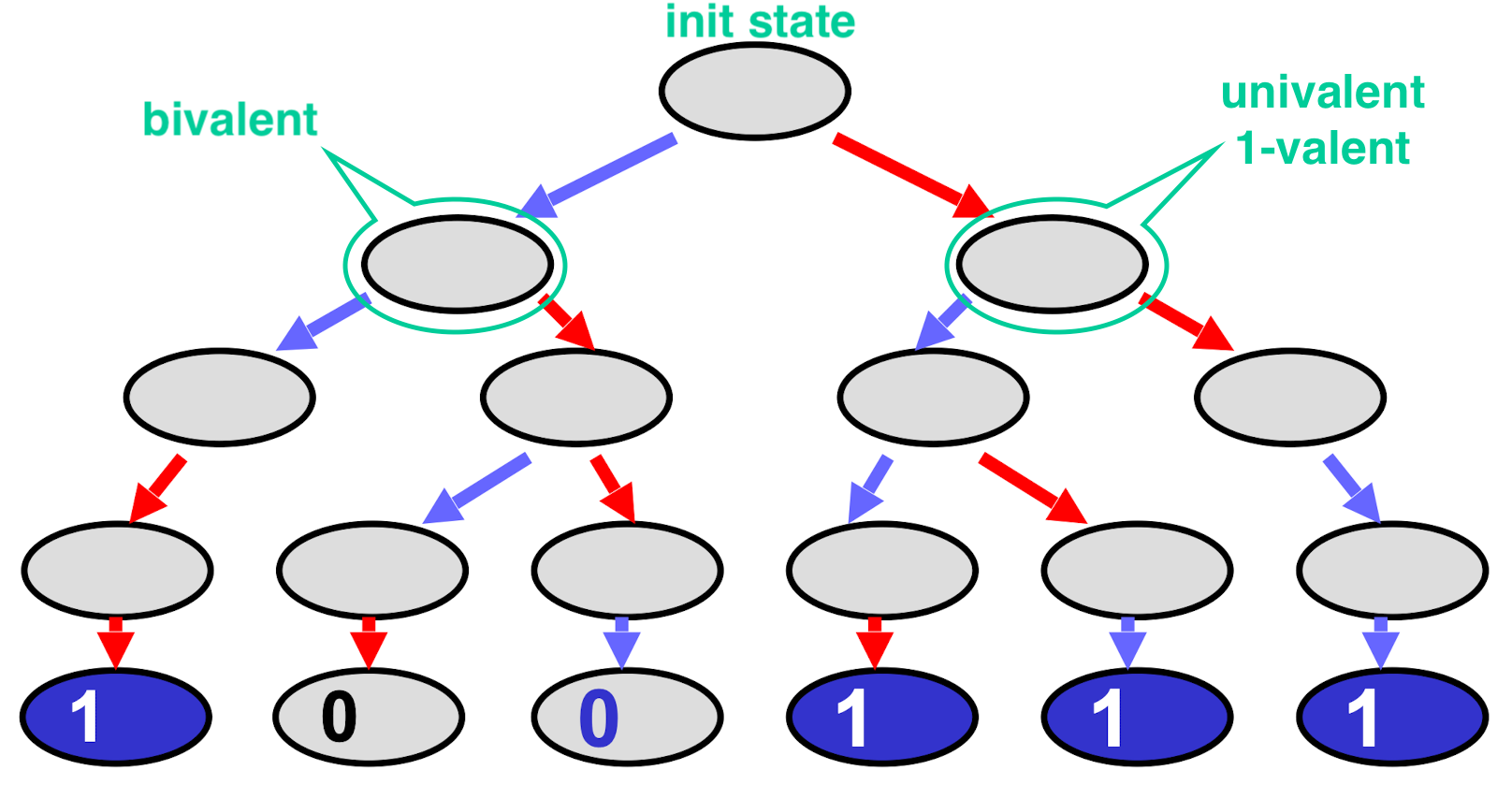
- Wait-free computation is a tree
- Bivalent State means outcome is not fixed
Univalent State means outcome is fixed
- 0-Valent & 1-Valent state means outcome is fixed to n
- Some initial state is bivalent
- Outcome depends on
- chance
- who runs by scheduler
- Critical State
- If A goes first, protocol decides 0
- If B goes first, protocol decides 1
- Protocol can reach a critical state
- Otherwise it will stay bivalent forever thus not wait-free
Atomic Registers Can’t Do Consensus
- If protocol exists
- It has a bivalent initial state leading to a critical state.
- But all possible pair of methods(read & write) lead to a contradiction.
FIFO Queue Implementation of Consensus
Generic Consensus Protocol
abstract class ConsensusProtocol<T> implements Consensus<T> {
protected T[] proposed = new T[N];
protected void propose(T value) {
proposed[Thread.getID()] = value;
}
abstract public T decide(T value);
}
Queue Consensus
public class QueueConsensus<T> extends ConsensusProtocol<T> {
private Queue queue;
public QueueConsensus() {
queue = new Queue();
queue.enq(Ball.RED); // Thread that dequeues RED ball will decide value
queue.enq(Ball.BLACK); // Thread with BLACK ball will use RED ball owner's proposed value.
}
public T decide(T value) {
propose(value);
Ball ball = queue.deq();
if (ball == Ball.RED)
return proposed[i]; // I got the red. Use my proposed value
else
return proposed[1-i]; // I got black ball. Use other's proposed value.
}
}
- We can solve 2-thread consensus using only a two-dequeuer queue
- Problem
- It is impossible to implement a two-dequeuer wait-free FIFO queue with read/write memory
Consensus Numbers
- An object X has consensus number n
- If it can be used to solve n-thread consensus together with atomic read/write registers
- Theorem
- If you can implement X from Y. And X has consensus number n, then Y has consensus number at least n
- Conversely, if X has consensus number n. And Y has consensus number m < n, then there is no way to construct a wait-free implementation of X by Y
- Example : Multiple Assignment Theorem
- Atomic registers cannot implement multiple assignment
- If we can write to 2 slots out of 3 array locations, we can solve 2-consensus -> which is impossible with atomic registers(consensus number 1)
- Therefore cannot implement multiple assignment with atomic registers
Read-Modify-Write Objects
Method call returns object’s prior value x, replace value x with
func(x)public int synchronized RMWmethod() { int prior = value; value = func(value); return prior; }- A RMW method is non-trivial if
- there exists a value v such that v ≠ func(v)
- Any non-trivial RMW object has consensus number at least 2
- Meaning, no wait-free implementation of RMW registers from atomic registers
// A two-thread consensus protocol using any non-trivial RMW object public class RMWConsensus extends ConsensusProtocol { private RMWRegister r = v; public decide(T value) { int i = Thread.getID(); propose(value); if (r.getAndMumble() == v) // I'm the first return proposed[i]; else return proposed[1-i]; } } - Any set of RMW objects that commutes or overwrites has consensus number exactly 2
- Commute: fi(fk(v))) = fk(fi(v)))
- Overwrite: fi(fk(v))) = fi(v)
test-and-set,swap(getAndSet),fetch-and-inc- Can be proved by using critical section analysis with three threads.
compare-and-sethas ∞ consensus numberpublic class RMWConsensus extends ConsensusProtocol { private AtomicInteger r = new AtomicInteger(-1); public T decide(T value) { int i = Thread.getID(); propose(value); r.compareAndSet(-1, i); // Winner(who runs CAS first) will set r value to it's ID. return proposed[r.get()]; } }
Lock-Free vs. Wait-Free
- Wait-Free: each method call takes a finite number of steps to finish
- Lock-Free: infinitely often some method call finishes
- Any wait-free implementation is lock-free
Universality of Consensus
Universality
- Consensus is universal
- From n-thread consensus we can build a
- Wait-Free
- Linearizable
- n-threaded implementation
- Of any sequentially specified object
Lock-Free Universal Construction
Naive Idea
- Consensus object stores reference to cell with current state
- Each thread creates new cell
- contains next state after computation
- tries to switch pointer to its outcome
- Fail!
- Consensus objects can be used only once
Linked-List Representation
Shows global execution order in LL foam
Each node contains a pointer to fresh consensus object used to decide on next operation
Object represented as
- Initial Object state
- A Log: a linked list of the method calls
Lock-Free Construction
public class Node {
public Invoc invoc;
public Consensus<Node> decideNext;
public Node next;
public int seq;
public Node(Invoc invoc) {
invoc = invoc;
decideNext = new Consensus<Node>();
seq = 0;
}
}
public class Universal {
private Node[] head;
private Node tail;
public Universal() {
head = new Node[N];
tail = new Node();
tail.seq = 1;
for (int i = 0; i < n; i++)
head[i] = tail;
}
public static Node max(Node[] arr) {
Node maxi = arr[0];
for (int i = 1; i < arr.length; i++)
if (maxi.seq < arr[i].seq)
max = arr[i];
return maxi;
}
public Response apply(Invoc invoc) {
int i = Thread.getID();
Node prefer = new node(invoc);
while (prefer.seq == 0) {
// repeat until my prefer got selected by decide().
Node before = Node.max(head);
Node after = before.decideNext.decide(prefer);
before.next = after;
after.seq = before.seq + 1;
head[i] = after;
}
// sequentially apply all previous & my invoc.
seqObject obj = new SeqObject();
Node curr = tail.next;
while (curr != prefer) {
obj.apply(curr.invoc);
curr = curr.next;
}
return obj.apply(curr.invoc);
}
}
- Contention: All threads repeatedly modify head
- Solution: Make head an array
Thread i updates location i
Find head by finding max seq of nodes referenced by head array - Still not wait-free
- Solution: Make head an array
Wait-Free Construction
- Lock-Free Construction + announce array
- Stores pointer to node in announce
- If a thread doesn’t append its node
- Another thread will see it in announce array and help append it
public class Universal {
private Node[] announce;
private Node[] head;
private Node tail;
public Universal() {
announce = new Node[N];
head = new Node[N];
tail = new Node();
tail.seq = 1;
for (int i = 0; i < n; i++) {
announce[i] = tail;
head[i] = tail;
}
}
public Response apply(Invoc invoc) {
int i = Thread.getID();
announce[i] = new Node(invoc); // Announce new method call, asking help from others
head[i] = Node.max(head);
while (announce[i].seq = 0) {
Node before = head[i];
Node help = announce[(before.seq + 1) % n]; // Choose random announce for candidate
if (help.seq == 0)
prefer = help;
else
prefer = announce[i]; // If candidate is already inserted, mind own business
}
}
}
Spin Locks and Contention
Architectures
- SISD (Uniprocessor)
- Single instruction stream
- Single data stream
- SIMD (Vector)
- Single instruction
- Multiple data
- MIMD (Multiprocessors)
- Multiple instruction
- Multiple data
- Shared Bus
- Cheap, but must wait for snooping (communication contention/latency)
- If destination is same, one must be blocked (memory contention)
- Distributed
- All to all communication
- Much more complicated circuit
- Each core has own caches/bus
- Shared Bus
What Should You Do If You Can’t Get a Lock
- Keep trying
- “spin” or “busy-wait”
- Good if delays are short
- Give up the processor
- Good if delays are long
- Always good on uniprocessor
Test-and-Set Lock
public class AtomicBoolean {
boolean value;
public synchronized boolean getAndSet(boolean newValue) {
boolean prior = value;
value = newValue;
return prior;
}
}
AtomicBoolean lock = new AtomicBoolean(false);
...
boolean prior = lock.getAndSet(true);
- Locking
- Lock is free: value is false
- Lock is taken: value is true
- Acquire lock by calling TAS
- If result is false, you win
- If result is true, you lose
- Release lock by writing false
class TASlock {
AtomicBoolean state = new Atomicboolean(false);
void lock() {
while (state.getAndSet(true)) {};
}
void unlock() {
state.set(false);
}
}
- Space complexity: O(1)
- Performance: Bad, so many cache invalidation
Test-and-Test-and-Set Lock
- Don’t call TAS if lock is acquired
- Less cache invalidation
class TTASlock {
AtomicBoolean state = new AtomicBoolean(false);
void lock() {
while (true) {
while (state.get()) {}; // read-only: no cache invalidation
if (!state.getAndSet(true))
return;
}
}
}
Cache
Fully Associative Cache
- Any line can be anywhere in the cache
- Pros: can replace any line
- Cons: hard to find lines (performance issue)
Direct Mapped Cache
- Every address has exactly 1 slot
- Pros: easy to find a line
- Cons: must replace fixed line
K-way Set Associative Cache
- Each slot holds k lines
- Pros: pretty easy to find a line
- Cons: some choice in replacing line
Cache Coherence Protocol
MESI
- Modified
- Have modified cached data, must write back to memory
- Exclusive
- Not modified, I have only copy
- Shared
- Not modified, may be cached elsewhere
- Invalid
- Cache contents not meaningful
Write-Through Cache
- Immediately broadcast changes / flush to memory
- Pros
- Memory, caches always agree
- More read hits maybe
- Cons
- Bus traffic on all writes
- Most writes to unshared data -> meaningless broadcasting
Write-Back Caches
- Accumulate changes in cache
- Write back when line evicted
- Need the cache for something else
- Another processor wants it
MOESI
- Owned
MOESIF
- Forward
- If current cache line owns recent version of variable, forward value to other’s cache line
Back to Spin-Locks
- Must optimize
- Bus bandwidth used by spinning threads
- Release / Acquire latency
- Acquire latency for idle lock
TAS Lock
- TAS invalidates cache lines
- Spinners
- Miss in cache
- Go to bus
- Thread wants to release lock -> delayed behind spinners
TTAS Lock
- Wait until lock “looks” free
- Spin on local cache
- No bus use while lock is busy
- Problem: when lock is released -> invalidation storm
- every other threads reread from memory & tries TAS(again invalidating others’ caches)
Exponential Backoff Lock
- If I fail to get lock
- Wait random duration before retry
- Each subsequent failure doubles expected wait
public class Backoff implements Lock {
public void lock() {
int delay = MIN_DELAY;
while (true) {
while (state.get()) {};
if (!ock.getAndSet(true))
return;
sleep(random() % delay);
if (delay < MAX_DELAY)
delay = 2 * delay;
}
}
}
- Pros
- Easy to implement / beats TTAS lock
- Cons
- Must choose parameters carefully
- Not portable across platforms
Anderson Queue Lock
- Avoid useless invalidations
- By keeping a queue of threads
- Each thread notifies next in queue without bothering the others
- Reduce cache invalidation
- Pros
- Shorter handover than backoff
- Scalable performance
- FCFS
- Cons
- space complexity O(LN)
- Many bits share the same cache line -> need to align them
class ALock implements Lock {
boolean[] flags {true, false, false, ... , false};
AtomicInteger next = new AtomicInteger(0);
ThreadLocal<Integer> mySlot;
public void lock() {
mySlot = next.getAndIncrement();
while (!flags[mySlot % N]) {}; // spin while mySlot is false
flags[mySlot % N] = false;
}
public void unlock() {
flags[(mySlot+1) % N] = true;
}
}
CLH Queue Lock
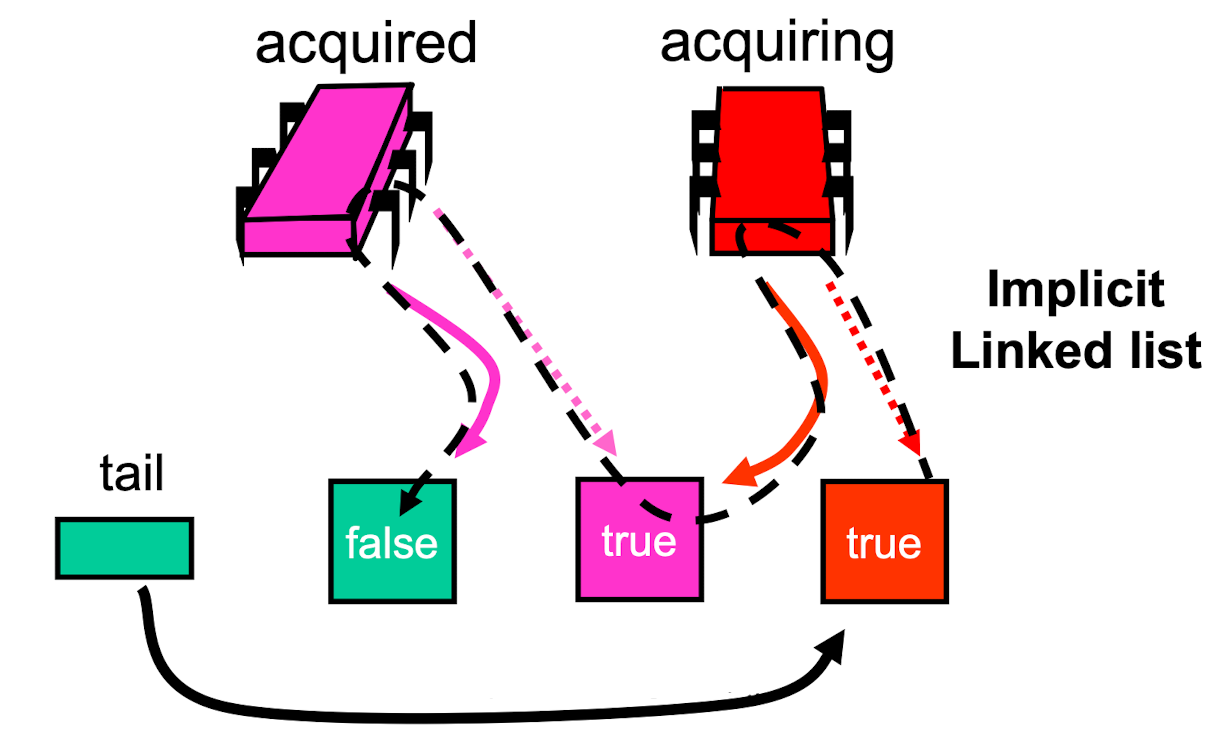
class QNode {
AtomicBoolean locked; // true means not released yet
public QNode(boolean value) {
locked = new AtomicBoolean(value);
}
}
class CLHLock implements Lock {
AtomicReference<QNode> tail = new QNode(false);
ThreadLock<QNode> myNode = new QNode(true);
public void lock() {
QNode pred = tail.getAndSet(myNode);
while (pred.locked) ();
}
public void unlock() {
myNode.locked.set(false);
}
}
- Pros
- Small, constant-size overhead per thread
- FCFS
- Lock release affects predecessor only
- Space complexity: O(L+N)
- Cons
- Doesn’t work for uncached NUMA architectures (intel)
- May spin on different region(predecessor’s ) of memory.
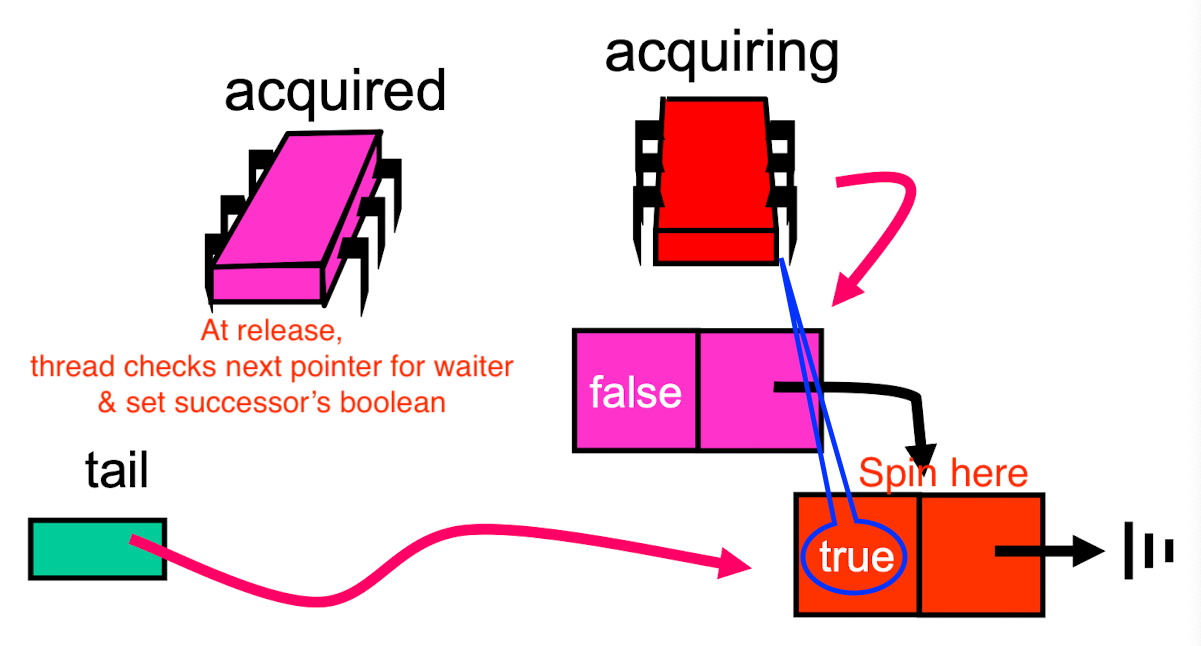
MCS Lock
class QNode {
volatile boolean locked;
volatile QNode next;
public QNode(boolean value) {
locked = value;
next = null;
}
}
class MCSLock implements Lock {
AtomicReference tail;
public void lock() {
QNode qnode = new QNode(false);
QNode pred = tail.getAndSet(qnode);
if (pred != null) {
qnode.locked = true;
pred.next = qnode;
while (qnode.locked) {};
}
}
public void unlock() {
if (qnode.next == null) {
if (tail.CAS(qnode, null))
return; // There is no successor
while (qnode.next == null) {}; // Wait for successor to finish pointer changing job.
}
qnode.next.locked = false;
}
}
- Pros
- FCFS
- Spin on local memory only
- Small, constant-size overhead
Concurrent Linked List
Coarse-Grained Synchronization
- Sequential bottleneck
- Threads “stand in line”
- Adding more threads does not improve throughput
Fine-Grained Synchronization
- Split object into independently-synchronized components
- Instead of using a single lock
- Methods conflict when they access…
- The same component
- At the same time
- Hand-over-Hand locking
Optimistic Synchronization
- Search without locking
- If item is found, lock & check…
- Validation of locked component
- If fail, start over -> expensive
- Validation
- After acquire two locks, make sure…
- First item is accessible from the head
- Second item is successor of first item
- After acquire two locks, make sure…
Lazy Synchronization
- Postponed hard work
- Remove in two steps
- Logical removal
- Mark component to be deleted
- Physical removal
- Do what needs to be done
- Logical removal
- Validation
- After acquire two locks, make sure…
- pred & curr is not marked
pred.next == curr
- After acquire two locks, make sure…
Lock-Free Synchronization
- Don’t use locks at all
- Use CAS & TAS… atomic actions
- Pros
- No scheduler assumptions/support
- Cons
- Complex
- Sometimes high overhead
- Combine pointer with valid bit
- Use CAS to verify pointer & valid bit
Representation Invariant
- 표현 불변성
- Correctness
- Property that always hold
- Established because
- True when object is created
- Truth preserved by each step of each method
Concurrent Queue & Stack
Terminology
- Bounded
- Fixed capacity
- Unbounded
- Unlimited capacity
- Blocking
- Block on attempt to remove from empty structure
- Block on attempt to add to full bounded structure
- Non-Blocking
- Throw exception on such attempts explained above
Bounded, Blocking, Lock-Based Queue
public interface Condition {
void await();
boolean await(long time, TimeUnit unit);
void signal();
void signalAll();
}
public class BoundedQueue<T> {
ReentrantLock enqLock = new ReentrantLock();
ReentrantLock deqLock = new ReentrantLock();
Condition notFullCondition = enqLock.newCondition();
Condition notEmptyCondition = deqLock.newCondition();
int capacity;
AtomicInteger size;
Node head;
Node tail;
public void enq(T x) {
boolean mustWakeDequeuers = false;
enqLock.lock();
// Queue is full wait for the signal
while (size.get() == Capacity)
notFullCondition.await();
Node e = new Node(x);
tail.next = e;
tail = tail.next;
if (size.getAndIncrement() == 0)
mustWakeDequeuers = true;
enqLock.unlock();
if (mustWakeDequeuers) {
deqLock.lock();
notEmptyCondition.signalAll();
deqLock.unlock();
}
}
}
enq()&deq()does not share locks- But they do share an atomic counter
size - Bottleneck!
- But they do share an atomic counter
Unbounded, Backoff, Lock-Free Stack
public class LockFreeStack {
private AtomicReference top = new AtomicReference(null);
public boolean tryPush(Node node) {
Node oldTop = top.get();
node.next = oldTop;
return (top.compareAndSet(oldTop, node));
}
public void push(T value) {
Node node = new Node(value);
while (true) {
if (tryPush(node))
return;
else
backoff.backoff();
}
}
}
- ABA problem might occur without GC
- Use Stamped Reference
Elimination-Backoff Stack
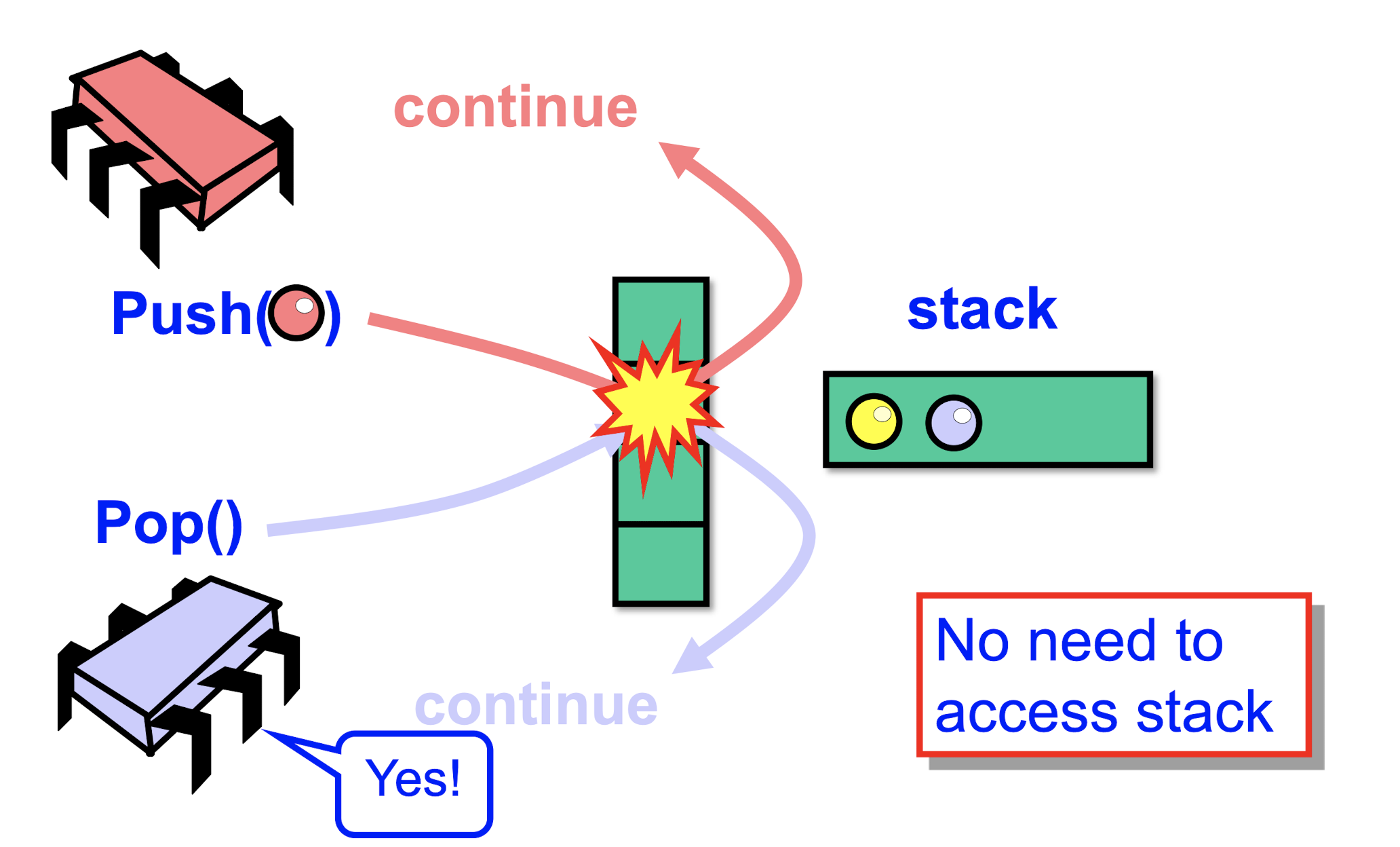
- Use Elimination Array to store temporary values during the function call
- Access Lock-Free stack,
- If uncontended, apply operation
- If contended back off to elimination array
- If collision occurs, pop element without reaching stack
